If you want to brush up your high school geometry knowledge, then KhanAcademy is a good place to start. For example, I learned a new proof of Pythagoras Theorem (there are 4 different proofs on KhanAcademy) which uses scissors-congruence:
In this post, I will share with you few theorems from L. I. Golovina and I. M. Yaglom’s “Induction in Geometry ” which I learned while trying to prove Midpoint-Polygon Conjecture.
Theorem 1: The sum of interior angles of an n-gon is
.
Theorem 2: The number of ways in which a convex n-gon can be divided into triangles by non-intersecting diagonals is given by

Theorem 3: Given a
, with
straight lines
drawn through its vertex
, cutting the triangle into
smaller triangles
. Denote by
and
respectively the radii of the inscribed and circumscribed circles of these triangles (all the circumscribed circles are inscribed within the angle
and
be the radii of the inscribed and circumscribed circles (respectively) of the
Theorem 4: Any convex n-gon which is not a parallelogram can be enclosed by a triangle whose sides lie along three sides of the given n-gon.
Theorem 5 (Levi’s Theorem): Any convex polygon which is not a parallelogram can be covered with three homothetic polygons smaller than the given one.
The above theorem gives a good idea of what “combinatorial geometry” is all about. In this subject, the method of mathematical induction is widely used for proving various theorems. Combinatorial geometry deals with problems, connected with finite configurations of points or figures. In these problems, values are estimated connected with configurations of figures (or points) which are optimal in some sense.
Theorem 6 (Newton’s Theorem): The midpoints of the diagonals of a quadrilateral circumscribed about a circle lie on one straight line passing through the centre of the circle.
Theorem 7 (Simson’s Theorem): Given a
with an arbitrary point
on this circle. Then then feet of the perpendiculars dropped from the point
We can extend the above idea of Simson’s line to any n-gon inscribed in a circle.
Theorem 8: A 3-dimensional space is divided into
parts by
Theorem 9: Given
Theorem 10 (Young’s Theorem): Given
.
I won’t be discussing their proofs since the booklet containing the proofs and the detailed discussion is freely available at Mir Books.
Also, I would like to make a passing remark about the existence of a different kind of geometry system, called “finite geometry“. A finite geometry is any geometric system that has only a finite number of points. The familiar Euclidean geometry is not finite because a Euclidean line contains infinitely many points. A geometry based on the graphics displayed on a computer screen, where the pixels are considered to be the points, would be a finite geometry. While there are many systems that could be called finite geometries, attention is mostly paid to the finite projective and affine spaces because of their regularity and simplicity. You can learn more about it here: http://www.ams.org/samplings/feature-column/fcarc-finitegeometries

 such that after
such that after  , we can restate the problem in terms of eigenvectors (referred to as eigenpolygons) and eigenvalues. Following are the crucial facts used is the proof:
, we can restate the problem in terms of eigenvectors (referred to as eigenpolygons) and eigenvalues. Following are the crucial facts used is the proof: eigenvector (when N-gon is written as linear combination of eigenpolygons) is the centroid of the polygon obtained by “winding”
eigenvector (when N-gon is written as linear combination of eigenpolygons) is the centroid of the polygon obtained by “winding” 
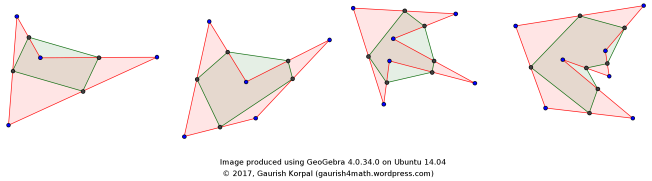

 , but I have no idea about how to prove it for concave polygons. I tried to Google for the answer, but couldn’t find anything similar. So, if you know the proof or counterexample of this conjecture, please let me know.
, but I have no idea about how to prove it for concave polygons. I tried to Google for the answer, but couldn’t find anything similar. So, if you know the proof or counterexample of this conjecture, please let me know.
You must be logged in to post a comment.