Following are some of the terms used in topology which have similar definition or literal English meanings:
- Convex set: A subset
of
is called convex1 , if it contains, along with any pair of its points
, also the entire line segement joining the points.
- Star-convex set: A subset
such that for each
, the line segment joining
to
lies in
- Simply connected: A topological space
is called simply connected if it is path-connected2 and any loop in
can be contracted3 to a point.
- Deformation retract: Let
a retraction such that its composition with the inclusion is homotopic5 to the identity map on
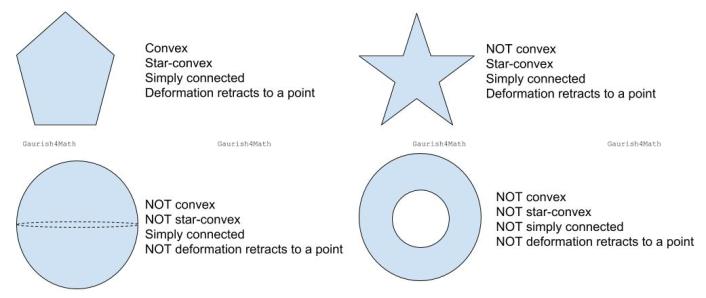
Various examples to illustrate the interdependence of these terms. Shown here are pentagon, star, sphere, and annulus.
A stronger version of Jordan Curve Theorem, known as Jordan–Schoenflies theorem, implies that the interior of a simple polygon is always a simply-connected subset of the Euclidean plane. This statement becomes false in higher dimensions.
The n-dimensional sphere 

The boundary of the n-dimensional ball 



Footnotes
- In general, a convex set is defined for vector spaces. It’s the set of elements from the vector space such that all the points on the straight line line between any two points of the set are also contained in the set. If
and
are points in the vector space, the points on the straight line between
for all
from 0 to 1.
- A path from a point
in a topological space
from the unit interval
to
and
. The space
- There exists a continuous map
such that
restricted to
is
denotes the unit circle and closed unit disk in the Euclidean plane respectively. In general, a space
are homotopy equivalent if they can be transformed into one another by bending, shrinking and expanding operations.
- Then a continuous map
is a retraction if the restriction of
to
- A homotopy between two continuous functions
from a topological space
such that, if
then
and
. Deformation retraction is a special type of homotopy equivalence, i.e. a deformation retraction is a mapping which captures the idea of continuously shrinking a space into a subspace.

nice beautiful little churnings in topology…it remiinds that many many ideas in mathematics start with “simple intuitive ideas” and then a mathematician goes on to formalize or generalize them…I think this is what Prof Michael Spivak says in the preface(s) of his three volume magnum opus, Differential geometry. On other hand, a socratic method of inquiry generally works well but it leads to foundations of logic/mathematics, but perhaps, I am digressing…
LikeLiked by 1 person